- 产品中心








在当今科技飞速发展的时代,协作机器人正逐渐成为工业生产和日常生活场景中的重要助力。它们凭借着与人类协同作业的能力,为生产效率的提升和工作环境的改善带来了诸多可能。而行星减速机作为协作机器人的核心部件之一,其安全设计对于整个机器人的稳定运行和操作人员的安全保障起着至关重要的作用。

行星减速机在协作机器人中的核心地位
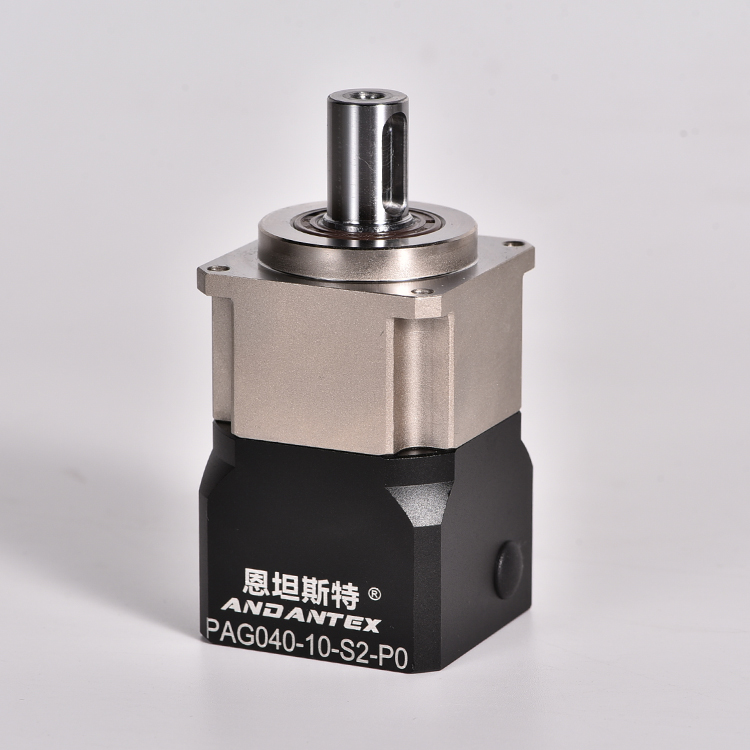
协作机器人需要具备精准的运动控制、足够的负载能力以及灵活的操作性能,行星减速机恰好能够满足这些需求。它通过齿轮的啮合传动,将高速低扭矩的电机输出转化为低速高扭矩的输出,为机器人的关节提供稳定而强大的动力支持。同时,行星减速机的高精度传动特性,使得机器人能够实现毫米级甚至更高精度的定位和运动控制,这对于一些对精度要求极高的作业任务,如电子元件的组装、精密仪器的调试等,是不可或缺的。
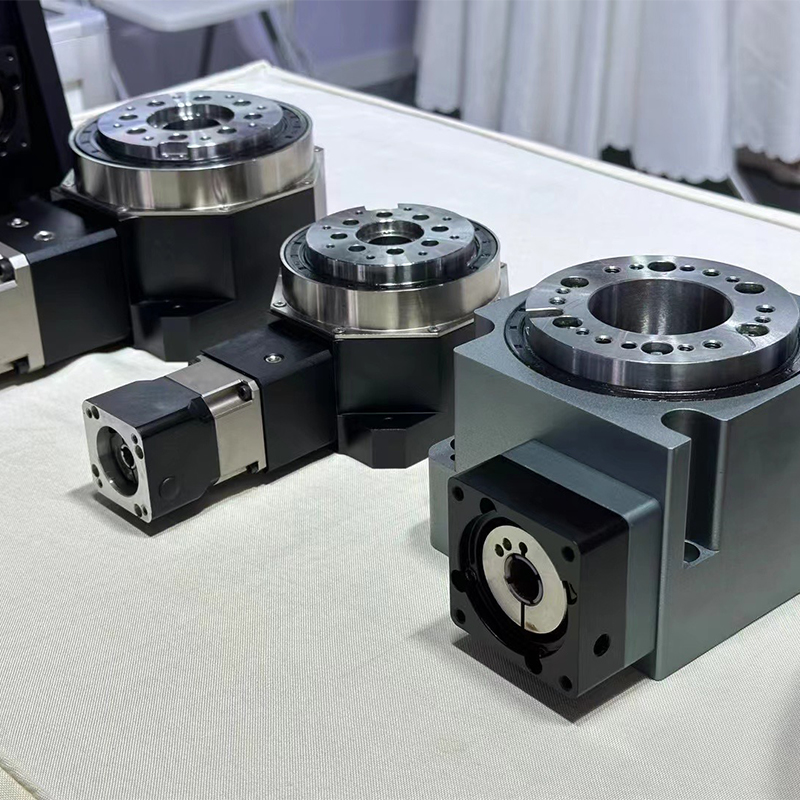
在协作机器人的多关节结构中,每个关节都可能配备行星减速机,以实现各个方向的运动。这些减速机协同工作,确保机器人能够按照预设的程序完成复杂的动作。因此,行星减速机的性能和可靠性直接关系到协作机器人的整体性能和工作质量。
安全设计的重要性
协作机器人的一个显著特点是与人类在同一个工作空间内协同作业,这就对其安全性提出了极高的要求。一旦行星减速机出现故障,可能会导致机器人失控,对操作人员造成伤害,同时也可能损坏周边的设备和产品。例如,如果减速机的齿轮出现断裂或磨损,可能会导致机器人的运动轨迹发生偏差,甚至突然停止或加速,从而引发安全事故。
此外,安全设计还能够延长行星减速机的使用寿命,降低维护成本。通过合理的设计和防护措施,可以减少减速机在工作过程中受到的磨损和冲击,提高其运行的稳定性和可靠性。这对于企业来说,不仅能够提高生产效率,还能够降低运营成本,提升经济效益。
机械结构安全设计
齿轮设计与材料选择
行星减速机的齿轮是其核心传动部件,齿轮的设计和材料选择直接影响到减速机的性能和安全性。在设计齿轮时,需要充分考虑其承载能力、传动精度和耐磨性。采用合理的齿形和齿数,能够提高齿轮的啮合效率和传动平稳性,减少噪音和振动。
材料的选择也至关重要。通常,会选用高强度、高硬度的合金钢作为齿轮的材料,并通过热处理工艺提高其表面硬度和耐磨性。同时,为了防止齿轮在运行过程中发生断裂,还需要对齿轮进行疲劳强度计算和优化设计,确保其在承受最大负载时仍能保持安全可靠。
壳体设计与防护
行星减速机的壳体不仅起到支撑和固定内部齿轮的作用,还承担着保护内部零件免受外界环境影响的任务。壳体应具备足够的强度和刚度,以承受减速机在工作过程中产生的各种力和扭矩。同时,壳体的密封设计也非常重要,能够有效防止灰尘、水分等杂质进入减速机内部,避免对齿轮和其他零件造成磨损和腐蚀。
在一些特殊的工作环境中,如高温、潮湿或有腐蚀性气体的场所,还需要对壳体进行特殊的防护处理,如采用耐高温、耐腐蚀的材料或涂层,以提高减速机的适应性和可靠性。
电气安全设计
过载保护
为了防止行星减速机因过载而损坏,需要设计相应的过载保护装置。常见的过载保护方式有热继电器保护和电子式过载保护。热继电器通过检测电流的大小,当电流超过设定值时,会自动切断电路,从而保护减速机不受损坏。电子式过载保护则具有更高的精度和响应速度,能够根据负载的变化实时调整保护参数,提供更加可靠的保护。
短路保护
短路是电气系统中常见的故障之一,可能会导致设备损坏甚至引发火灾。因此,在行星减速机的电气设计中,必须设置短路保护装置,如熔断器或断路器。当电路发生短路时,短路保护装置能够迅速切断电路,防止故障扩大,保障设备和人员的安全。
监控与诊断系统设计
实时监测
为了及时发现行星减速机在运行过程中出现的问题,需要建立实时监测系统。通过在减速机上安装各种传感器,如温度传感器、振动传感器和转速传感器等,可以实时监测减速机的运行状态。温度传感器能够监测减速机内部的温度变化,当温度超过正常范围时,及时发出警报,提醒操作人员采取措施。振动传感器可以检测减速机的振动情况,异常的振动可能预示着齿轮磨损、轴承损坏等问题。转速传感器则能够实时监测减速机的输出转速,确保其运行在正常的速度范围内。
故障诊断
基于实时监测系统收集到的数据,还需要建立故障诊断模型。通过对数据的分析和处理,能够判断减速机是否存在故障以及故障的类型和位置。例如,当温度传感器检测到温度异常升高时,结合振动传感器的数据,可以初步判断是由于齿轮摩擦增大还是轴承润滑不良等原因导致的。故障诊断系统能够为维修人员提供准确的故障信息,提高维修效率,减少停机时间。
人机交互安全设计
紧急停止装置
在协作机器人的工作区域,必须设置明显的紧急停止装置。当发生紧急情况时,操作人员能够迅速按下紧急停止按钮,使机器人立即停止运行。行星减速机作为机器人的动力传输部件,在接收到紧急停止信号后,应能够快速响应,停止输出动力,确保机器人在最短的时间内停止运动,避免对人员和设备造成伤害。
安全警示标识
在行星减速机及其周边区域,应设置清晰的安全警示标识,提醒操作人员注意安全。标识内容可以包括减速机的额定负载、运行注意事项、危险区域等。通过安全警示标识的设置,能够增强操作人员的安全意识,减少因操作不当而引发的安全事故。
行星减速机在协作机器人中的安全设计是一个系统工程,涉及到机械结构、电气系统、监控与诊断以及人机交互等多个方面。只有通过全面、细致的安全设计,才能确保行星减速机在协作机器人中稳定、可靠地运行,为协作机器人的安全应用提供有力保障。随着协作机器人技术的不断发展,行星减速机的安全设计也将不断优化和完善,以适应更加复杂和多样化的应用场景。