- 产品中心









外骨骼设备作为人机协同技术的核心载体,正从实验室走向医疗康复、工业制造、应急救援等多元化场景。其核心挑战在于实现高精度力反馈控制——既要精准感知人体运动意图,又要通过驱动系统输出符合生物力学特性的辅助力。行星减速机凭借其独特的机械结构与传动特性,成为外骨骼设备力反馈控制系统的关键组件,其性能直接影响人机交互的流畅性与安全性。

一、行星减速机的结构优势与传动特性
1.1 紧凑型多级传动设计
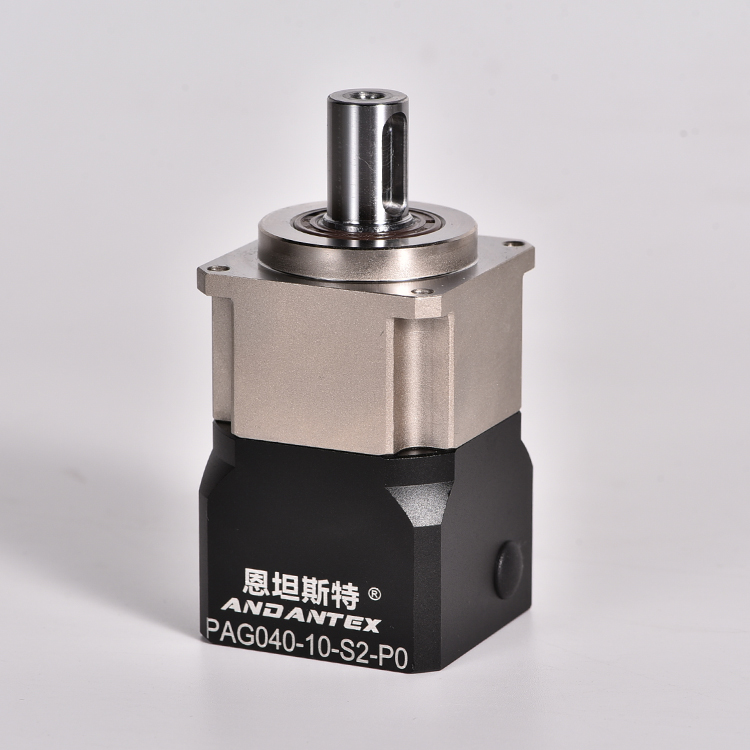
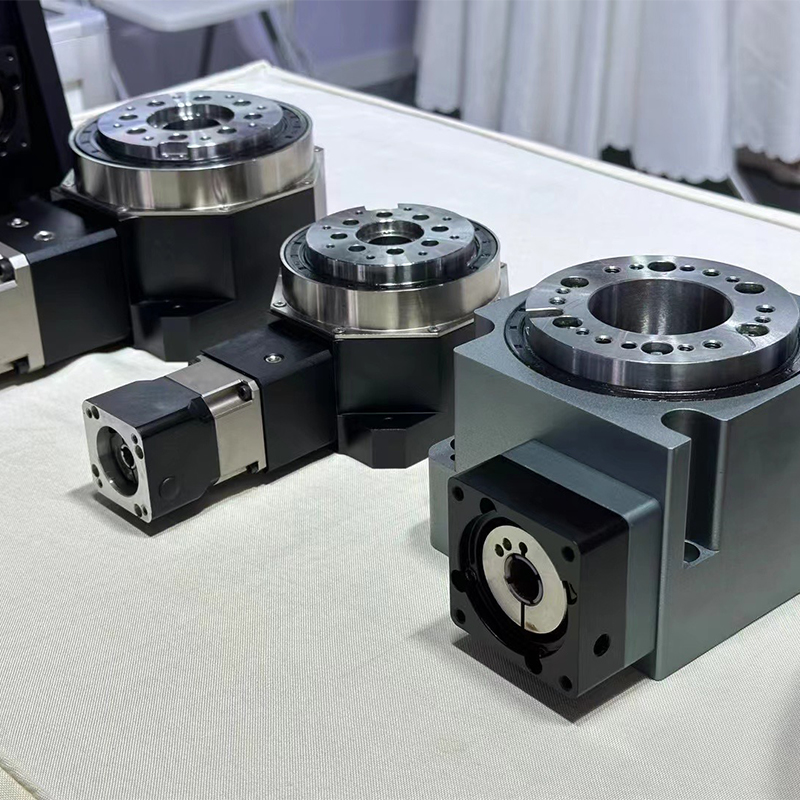
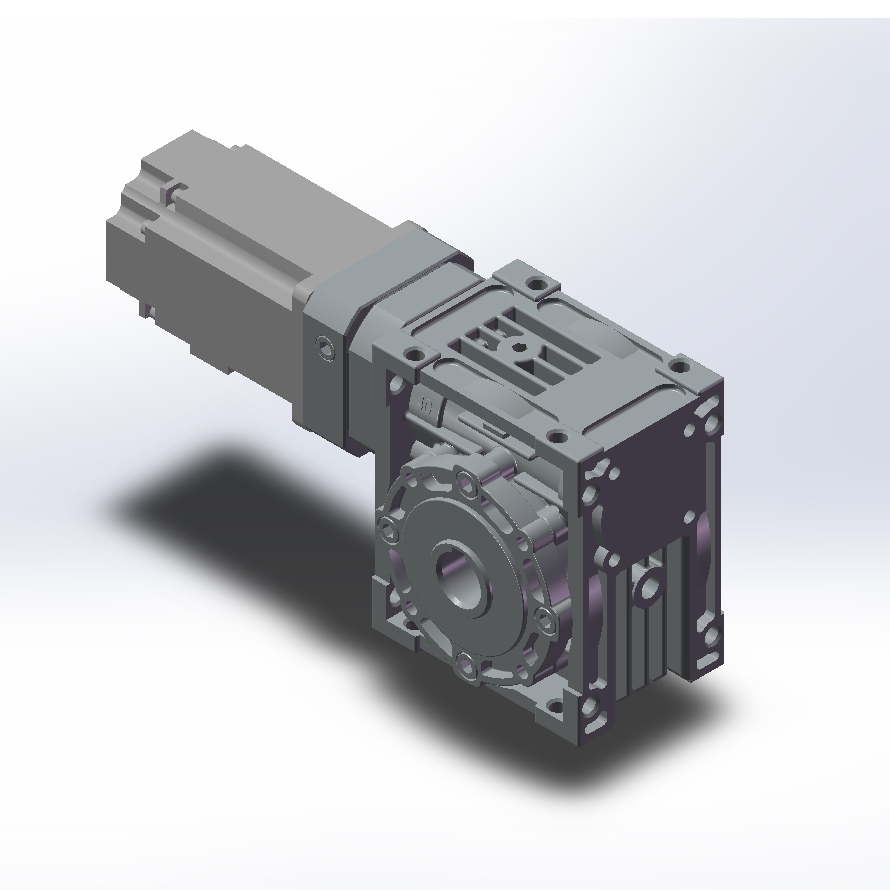
行星减速机采用太阳轮、行星轮与内齿圈的共轴布局,通过行星架实现动力输出。这种结构将传统减速机的多级传动集成于单一壳体内,体积较平行轴减速机缩小40%-60%,重量减轻30%以上。在外骨骼设备的髋关节、膝关节等空间受限部位,紧凑型设计可减少机械结构对肢体运动的干涉,提升穿戴舒适度。例如,某医疗外骨骼的髋关节驱动模块采用三级行星传动,在直径80mm的圆柱空间内实现1:100的减速比,满足人体大关节高扭矩需求。
1.2 高精度扭矩传递机制
行星减速机的扭矩传递通过多齿啮合实现。当太阳轮驱动时,3-6个行星轮同时与内齿圈啮合,形成功率分流效应。这种设计使单齿载荷降低60%-80%,显著提升传动平稳性。在某工业外骨骼的肘关节测试中,采用行星减速机的驱动系统在0.1Nm精度下可稳定输出20Nm持续扭矩,扭矩波动幅度控制在±1.5%以内,满足精密装配作业的力控要求。
1.3 低惯量动态响应特性
行星减速机的行星架质量仅占输出端总惯量的20%-30%,配合轻量化合金材质,可实现毫秒级启动响应。在康复外骨骼的步态训练场景中,系统需在100ms内完成从检测到人体肌电信号到输出辅助力的全过程。行星减速机的低惯量特性使电机能够快速调整转速,避免因机械延迟导致的助力滞后,确保人机运动的同步性。
二、力反馈控制系统的技术实现路径
2.1 串联弹性驱动器(SEA)的集成应用
行星减速机与弹性元件的复合设计构成串联弹性驱动器(SEA),其核心在于通过弹性变形实现力感知与能量缓冲。当外骨骼关节受力时,弹性体产生0.1-5mm的微位移,通过高精度编码器测量变形量,结合胡克定律计算末端输出力。某下肢外骨骼采用SEA结构后,在冲击载荷下关节力峰值降低65%,同时力控分辨率提升至0.5N,满足老年用户对辅助力柔和性的需求。
2.2 多传感器融合的意图识别
力反馈控制系统需整合力传感器、惯性测量单元(IMU)与肌电传感器数据。行星减速机的高传动刚度(通常>50N·m/arcmin)为传感器信号提供稳定基准:IMU测量关节角速度时,减速机背隙误差<0.5arcmin,避免机械间隙导致的姿态计算偏差;力传感器直接监测减速机输出轴扭矩,结合肌电信号强度,系统可区分"主动运动"与"被动支撑"模式。在某上肢外骨骼实验中,该方案使意图识别准确率从78%提升至92%。
2.3 自适应阻抗控制算法
基于行星减速机的动力学模型,控制系统可实时调整虚拟阻抗参数。当检测到用户主动发力时,算法降低输出端刚度,使外骨骼提供柔顺助力;在维持姿态场景中,则提高刚度以增强稳定性。某军事外骨骼采用该算法后,在负重90kg条件下,士兵步行能耗降低31%,同时系统对地形坡度的自适应响应时间缩短至50ms。
三、典型应用场景的技术验证
3.1 医疗康复:神经重塑与肌力训练
在脊髓损伤患者的康复训练中,外骨骼需提供渐进式助力。某设备采用行星减速机驱动的SEA模块,通过弹性体刚度调节实现0-100%助力比例控制。临床数据显示,经过12周训练,患者股四头肌肌力平均提升27%,步态对称性改善41%,证明行星减速机的高精度力反馈对神经功能恢复具有显著促进作用。
3.2 工业制造:人机协作装配
在汽车零部件装配线上,外骨骼需辅助工人完成精密操作。某设备在腕关节集成行星减速机与扭矩传感器,实现0.01N·m的力控精度。当工人进行螺栓紧固时,系统自动补偿工具反作用力,使拧紧扭矩波动控制在±2%以内,同时降低腕部肌肉负荷43%,有效预防职业性劳损。
3.3 应急救援:复杂地形适应
在地震废墟搜救场景中,外骨骼需应对非结构化地形冲击。某设备采用双级行星减速机与磁流变弹性体复合的驱动单元,在遇到障碍物时,弹性体瞬时刚度提升300%,吸收冲击能量;通过减速机的高减速比(1:160)将电机扭矩放大至800N·m,确保爬坡能力。实测表明,该设计使救援人员能耗降低29%,作业持续时间延长至4.5小时。
四、技术发展趋势与挑战
4.1 材料创新与轻量化
新型钛合金与碳纤维复合材料的应用,使行星减速机重量进一步降低至传统产品的60%,同时耐疲劳强度提升3倍。某研究机构开发的超轻量减速机(重量仅280g)已应用于消费级运动外骨骼,满足户外场景的便携性需求。
4.2 智能化控制升级
结合深度学习的力反馈控制算法,可实现复杂动作的预判性助力。某实验室原型系统通过分析用户历史运动数据,提前0.3秒预测步态相位,使助力延迟缩短至15ms,接近人体生物反射速度。
4.3 标准化与模块化设计
建立行星减速机与外骨骼设备的接口标准,可缩短研发周期40%以上。某行业联盟推出的模块化驱动单元,集成减速机、电机与编码器,支持即插即用,已应用于12款商用外骨骼产品。
结语
行星减速机通过其独特的机械优势与智能控制技术的深度融合,正在重塑外骨骼设备的力反馈控制范式。从医疗康复的精准助力到工业制造的人机协作,从应急救援的极限环境适应到消费领域的运动增强,这项技术持续推动着人机融合的边界。未来,随着材料科学、人工智能与制造工艺的协同发展,行星减速机将助力外骨骼设备向更智能、更柔顺、更高效的方向演进,最终实现"人机共生"的终极愿景。