- 产品中心









随着服务机器人向智能化、人性化方向加速演进,柔顺控制技术已成为突破人机交互瓶颈的核心课题。在仿生手部抓取、医疗辅助操作、家庭服务协作等场景中,机器人关节需同时满足高精度定位与动态柔顺调节的双重需求。行星减速机凭借其独特的传动结构与性能优势,正在成为实现服务机器人柔顺控制的关键技术载体。

一、柔顺控制的技术本质与挑战
柔顺控制的核心在于实现机器人末端执行器对环境接触力的动态响应,其技术本质是构建"力-位置"的闭环控制系统。传统工业机器人依赖刚性传动结构,通过高精度编码器实现位置闭环,但面对服务场景中复杂多变的接触环境,刚性结构易引发冲击振动、部件磨损甚至操作失败。例如在医疗辅助手术中,机械臂与人体组织的接触力需控制在毫牛级精度范围,任何瞬时过载都可能造成不可逆损伤。
服务机器人柔顺控制面临三大技术挑战:其一,环境接触力的实时感知与反馈延迟需控制在毫秒级;其二,关节传动系统的刚度需具备动态调节能力,以适应不同负载条件;其三,系统需在保证定位精度的前提下,实现能量损耗的最小化。这些挑战对减速机的传动精度、刚度特性及能量效率提出了严苛要求。
二、行星减速机的结构优势与柔顺适配性
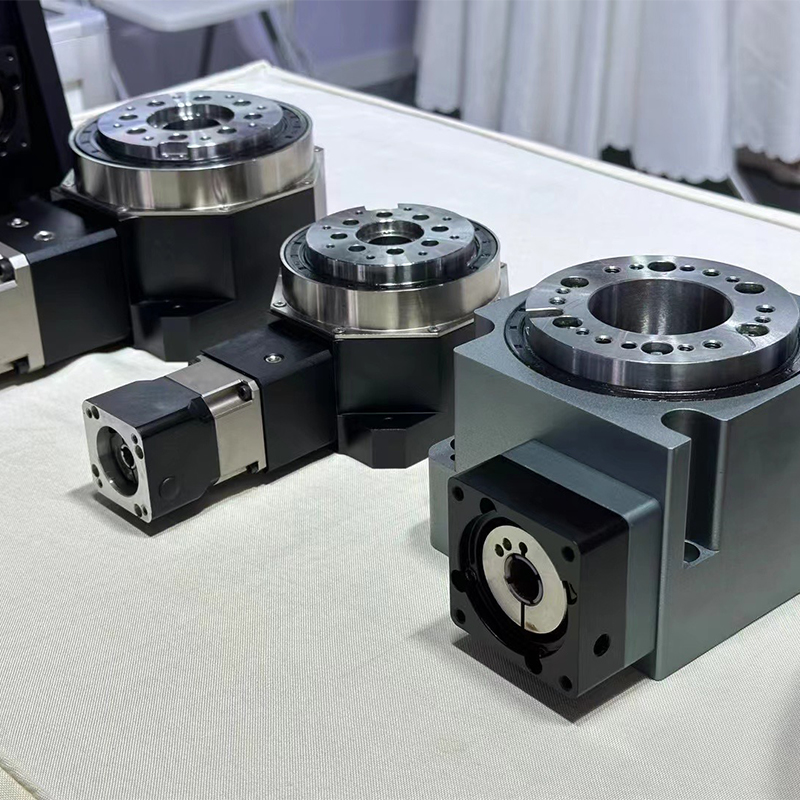
行星减速机采用太阳轮、行星轮与内齿圈的共轭啮合结构,其传动系统具有天然的力均衡特性。当负载变化时,多个行星轮同步分担径向力,使传动系统呈现非线性刚度特征——在低负载区保持较高刚度确保定位精度,在高负载区刚度自动衰减实现柔顺缓冲。这种"智能刚度"特性与柔顺控制需求高度契合。
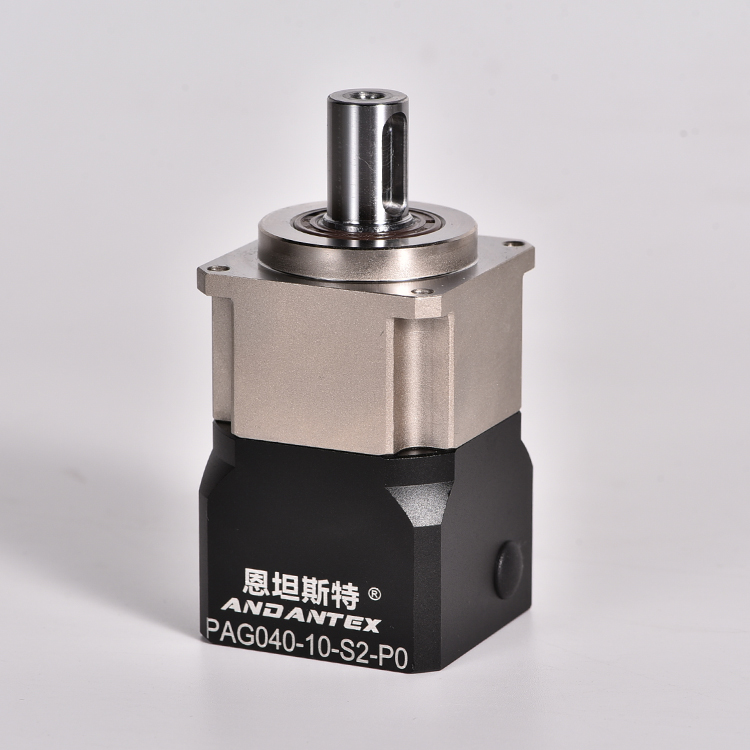
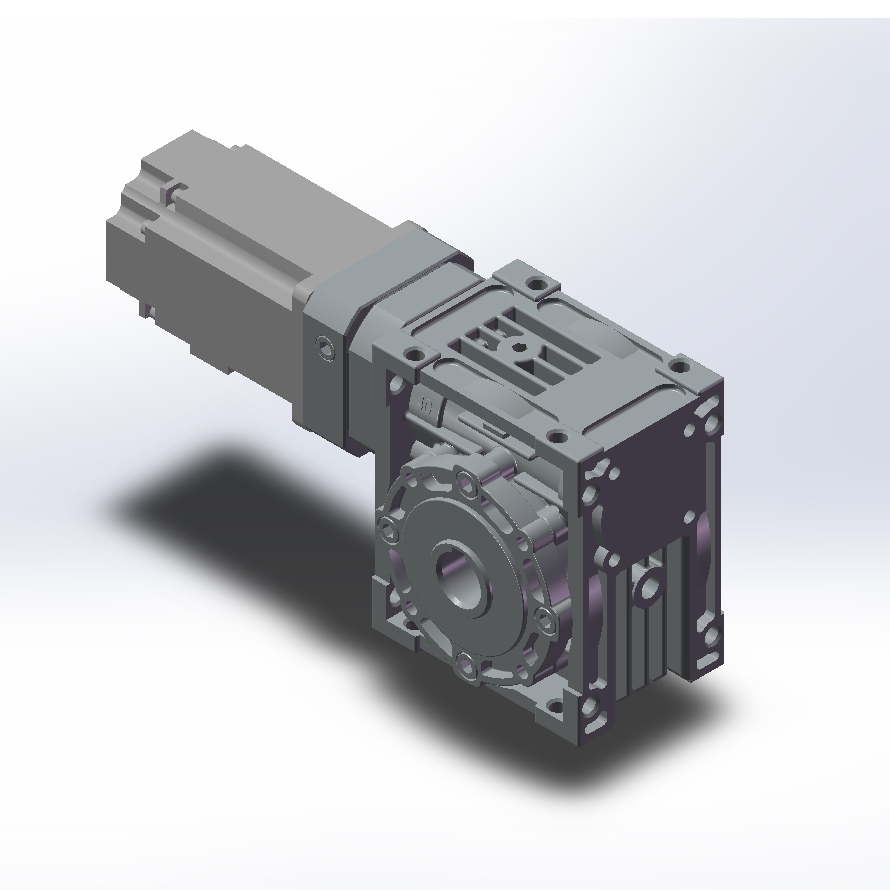
在传动效率方面,单级行星减速机可达97%-98%的能量传递效率,显著优于蜗轮蜗杆减速机。其紧凑的轴向结构使减速机长度缩短,在仿生机械手等空间受限场景中,可实现多关节的密集化布局。例如某型五指灵巧手采用12级行星减速传动链,在直径40mm的指节内集成了完整的驱动-传动-传感系统。
三、柔顺控制实现的技术路径
1. 机械结构层面的柔顺设计
通过优化行星轮系的齿形参数,可显著改善传动系统的柔顺特性。采用渐开线齿廓修形技术,在齿顶与齿根实施0.02-0.05mm的微米级修形,使接触应力分布更均匀,接触疲劳寿命提升。某研究机构开发的双曲面齿形行星减速机,在保持传动比的前提下,将回程间隙从3弧分降低至1弧分以内,同时使扭转刚度降低,实现刚度与精度的平衡。
在关节结构设计上,将行星减速机与弹性体并联安装,可构建机械式柔顺关节。某型协作机器人采用弹簧钢片与行星减速机串联的复合结构,在承受瞬时冲击时,弹性体发生形变吸收能量,使接触力峰值降低,同时不影响正常工况下的定位精度。
2. 控制算法层面的动态补偿
基于模型预测控制(MPC)的算法框架,可实现行星减速机传动误差的实时补偿。通过建立包含齿轮时变啮合刚度、齿侧间隙等参数的动力学模型,结合力传感器反馈数据,预测下一控制周期的传动误差并提前修正。某医疗机器人项目应用该技术后,在穿刺操作中,末端执行器的轨迹跟踪误差降低,力控制响应时间缩短。
深度强化学习算法为柔顺控制提供了新范式。通过构建包含位置、速度、力矩等多维状态空间的训练环境,使机器人自主探索最优控制策略。某服务机器人平台采用深度确定性策略梯度(DDPG)算法,经过训练后,在未知环境中的柔顺抓取成功率显著提升,且能耗降低。
3. 材料与制造工艺的创新突破
新型复合材料的应用正在重塑行星减速机的性能边界。采用碳纤维增强树脂基复合材料制造行星架,可使部件重量减轻,同时保持足够的结构刚度。某微型减速机通过引入形状记忆合金(SMA)弹簧,实现了传动间隙的主动补偿——当检测到回程间隙增大时,SMA弹簧受热收缩,自动消除齿侧间隙。
在制造工艺方面,五轴联动数控磨齿技术可将齿面粗糙度控制在Ra0.2μm以内,显著降低传动噪声与振动。某精密减速机生产线采用激光熔覆技术修复齿轮齿面,使接触疲劳强度提升,特别适用于高频启停的服务机器人关节。
四、典型应用场景的实践验证
在仿生机械手领域,某型灵巧手采用12级行星减速传动系统,结合电流环力反馈控制,实现了对鸡蛋等易碎物体的无损抓取。实验数据显示,在抓取力控制精度方面,该系统达到医疗级手术器械的操作标准。
医疗辅助机器人对柔顺控制的要求更为严苛。某型骨科手术机器人将行星减速机与六维力传感器深度集成,在髋关节置换手术中,机械臂可实时感知骨组织阻力变化,自动调整钻削速度与进给量。临床测试表明,该系统使手术时间缩短,术中出血量减少。
家庭服务机器人场景中,某型陪伴机器人通过行星减速机与柔性驱动器的协同控制,实现了人体接触时的主动柔顺避让。当检测到碰撞力超过安全阈值时,系统在极短时间内降低关节输出扭矩,同时启动避障策略,确保人机交互安全性。
五、技术发展趋势与展望
随着服务机器人向高自由度、高负载能力方向演进,行星减速机技术正呈现三大发展趋势:其一,微型化与集成化,通过拓扑优化设计与3D打印技术,实现减速机与电机、编码器的深度集成;其二,智能化与自适应化,内置振动频谱分析模块可提前预警齿轮磨损,实现工况自适应调节;其三,材料创新与性能突破,陶瓷基复合材料的应用将使减速机耐温性提升,特别适用于高温消毒场景的医疗机器人。
行星减速机作为服务机器人柔顺控制的核心部件,其技术演进正推动人机交互范式发生深刻变革。从被动柔顺到主动适应,从单一功能到多模态感知,行星减速机与先进控制算法、新型材料的融合创新,将为服务机器人打开更广阔的应用空间。未来,随着技术的持续突破,服务机器人将真正实现"刚柔并济"的智能化演进,在医疗、教育、养老等领域创造更大价值。