- 产品中心









谐波减速器凭借其零背隙、高精度、轻量化、紧凑设计等优势,成为工业机器人关节驱动的核心部件,尤其适用于协作机器人(Cobot)、SCARA机器人、六轴多关节机器人等精密运动控制场景。以下是其核心应用优势及典型案例分析。
![]()
推荐产品:
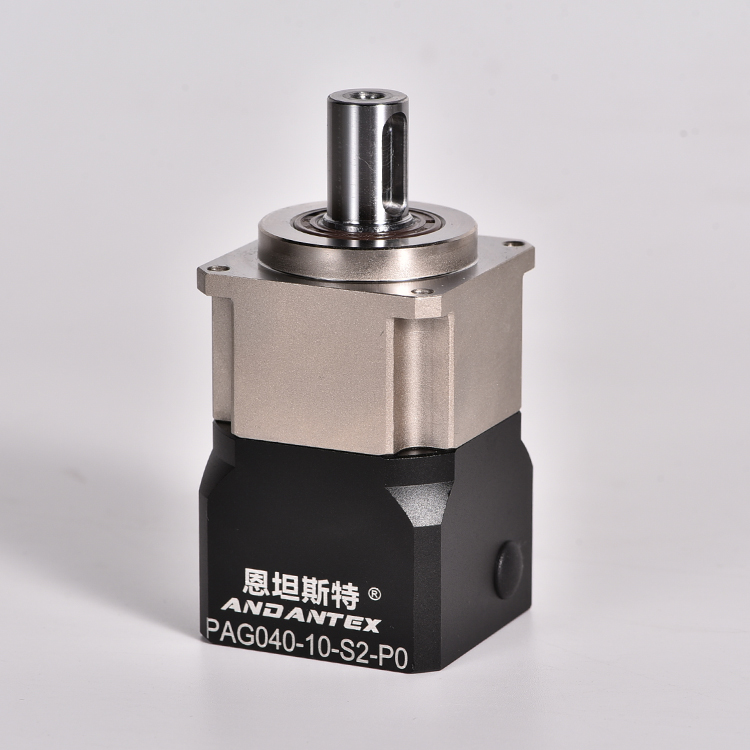
● 高精度斜齿轮行星减速机PAG系列
● 调谐波减速机
实际应用案例
电子装配(SCARA机器人):谐波减速器驱动J3轴,实现芯片贴装精度±0.02mm。
汽车焊接(六轴机器人):腕部关节采用谐波减速器,确保焊枪路径误差<0.1mm。
食品分拣(Delta机器人):每分钟抓取400次,谐波减速器寿命>50,000小时。
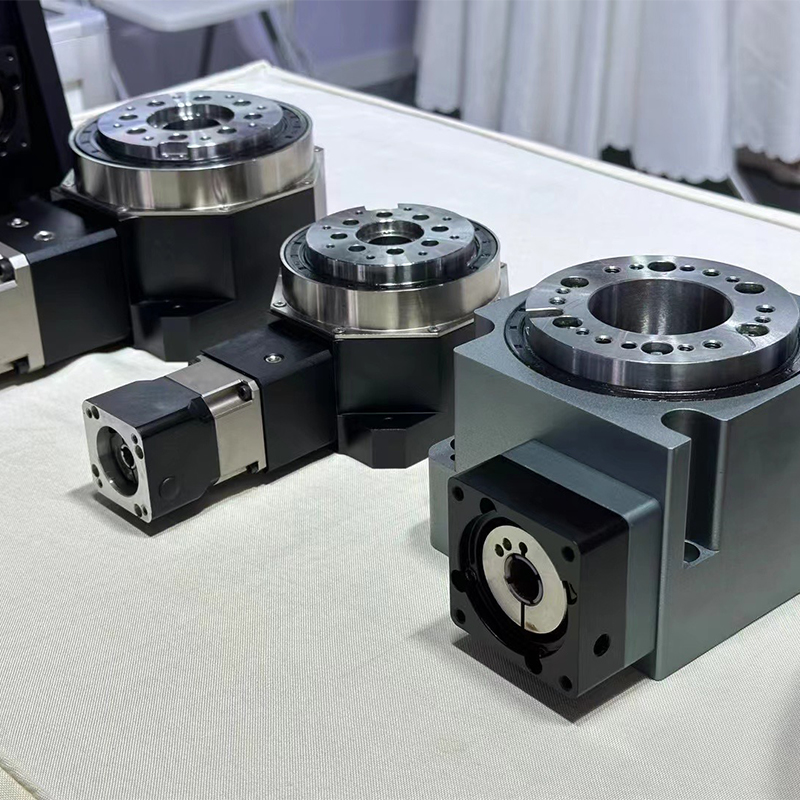
典型应用场景
1. 协作机器人(Cobot)
需求:轻量化、零背隙、安全柔性控制。
应用:
驱动6-7个关节,实现±0.05mm重复定位精度。
例如UR(优傲机器人)、FANUC CRX系列。
2. SCARA机器人(平面关节型)
需求:高速、高精度(如电子装配、贴片机)。
应用:
Z轴旋转关节,实现每分钟300次以上的精准取放。
例如EPSON LS系列、YAMAHA YK系列。
3. 六轴多关节机器人
需求:多自由度灵活运动,适用于焊接、喷涂、搬运。
应用:
关节J4-J6(腕部)采用谐波减速器,减少末端抖动。
例如FANUC M-20iD、KUKA KR AGILUS。
4. 并联机器人(Delta)
需求:超高速度(每分钟200次以上抓取)。
应用:
驱动主动臂旋转,实现食品分拣、包装。
例如ABB FlexPicker、FANUC M-1iA。
5. 医疗/手术机器人
需求:零背隙、无磁性、洁净环境兼容。
应用:
精密器械控制(如达芬奇手术机器人关节驱动)。
谐波减速器的核心优势(对比行星减速机)
| 特性 | 谐波减速器 | 行星减速机 | 适用场景 |
|---|---|---|---|
| 背隙 | 零背隙(≤0.1弧分) | 低背隙(≤1弧分) | 高精度定位(如机器人关节) |
| 精度 | 重复定位精度±0.01mm | ±0.02mm | 精密装配、半导体搬运 |
| 体积/重量 | 超紧凑、轻量化(减重30%) | 较大、较重 | 协作机器人(Cobot) |
| 传动效率 | 80-90% | ≥97% | 中低负载高速场景 |
| 负载能力 | 中低扭矩(≤500Nm) | 高扭矩(可达数万Nm) | 轻型机器人 vs 重型机床 |
| 成本 | 较高 | 中等 | 高端机器人优先选择 |
选型关键参数
| 参数 | 工业机器人要求 | 影响 |
|---|---|---|
| 背隙 | ≤0.1弧分(零背隙) | 决定重复定位精度(±0.01mm) |
| 额定扭矩 | 10-500Nm(关节负载) | 需匹配机器人臂展和末端负载 |
| 扭转刚度 | ≥10 Nm/arcmin | 影响抗振动能力(高速运动稳定性) |
| 防护等级 | IP65(防尘防溅水) | 适应工业环境(如焊接、喷涂) |
| 温度范围 | -10℃~80℃ | 避免高温导致谐波发生器失效 |
行业发展趋势
更高扭矩密度:
采用复合材料柔轮(如碳纤维),提升负载能力(未来目标:1000Nm级)。
智能化集成:
内置扭矩传感器+温度监测,实时反馈关节状态(预防过载或磨损)。
低成本化:
优化生产工艺(如3D打印柔轮),降低谐波减速器价格(目标:替代部分行星减速机市场)。
协作机器人专用:
开发低噪音(<60dB)、免润滑型号,满足人机协作安全需求。
谐波减速器凭借零背隙、高精度、轻量化的特性,成为工业机器人关节驱动的首选,尤其在高精度、高动态响应场景(如3C电子、医疗、协作机器人)中不可替代。未来,随着协作机器人、人机交互、智能制造的发展,谐波减速器将向更高负载、更智能、更低成本方向演进,进一步巩固其在机器人领域的核心地位。
| 购买人 | 会员级别 | 数量 | 属性 | 购买时间 |
|---|