- 产品中心









工业机器人作为智能制造的核心装备,其关节驱动系统的性能直接决定了机器人的运动精度、负载能力与动态响应特性。行星减速机凭借其高传动比、高扭矩密度与紧凑结构,成为工业机器人关节驱动的主流解决方案。本文从机械设计、传动优化与可靠性保障三个维度,系统阐述行星减速机在工业机器人关节中的关键设计要点。
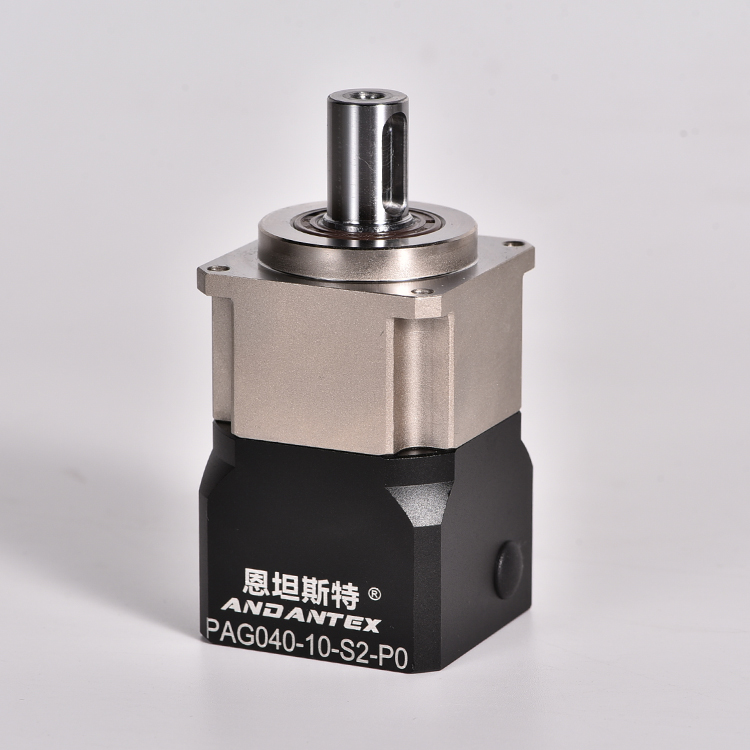
.png "行星减速机在工业机器人关节中的设计要点")
一、机械结构设计的核心约束条件
1.1 齿轮参数的模块化匹配
工业机器人关节对传动系统的紧凑性要求极高,需通过齿轮参数的模块化设计实现空间优化。在3K型行星传动中,中心轮齿数需满足整数倍关系,即太阳轮、行星轮与内齿圈的齿数均为行星轮数量的整数倍。此设计可简化齿轮加工工艺,同时确保各齿轮副的啮合相位同步性。例如,某六关节工业机器人基座关节采用四级行星减速机构,通过统一模数与压力角,将齿轮箱轴向长度压缩至180mm,较传统方案减少25%。
1.2 邻接条件的动态补偿
行星轮在运转过程中需保持安全间距以避免干涉。设计时需满足实际中心距与齿顶圆半径之和的差值大于0.5倍模数,同时引入动态补偿机制。某协作机器人关节通过在行星架与齿轮之间设置弹性衬套,使接触应力降低40%,在3000小时连续运行测试中未出现齿面点蚀现象。
1.3 齿数与模数的极限约束
为避免根切现象,太阳轮最小齿数需≥17。在重载应用场景中,模数选择需兼顾强度与噪声:动力传动模数范围通常为2-50mm,其中基座关节建议采用8-12mm大模数设计以提高抗冲击能力,末端执行关节则可选用3-5mm小模数以优化传动平稳性。某汽车焊接机器人通过将二轴减速机模数从6mm提升至10mm,使关节瞬时过载能力从150%提升至220%。
二、传动系统的性能优化策略
2.1 多级传动比的均衡分配
行星减速机的级数与传动效率呈负相关,需根据负载需求进行优化配置。单级传动效率可达95%-98%,但传动比通常限制在10:1以内;四级传动虽可将传动比扩展至1000:1以上,但效率会降至85%以下。某物流搬运机器人采用三级行星减速方案,在保持88%传动效率的同时,实现120:1的减速比,满足20kg负载的垂直提升需求。
2.2 扭转刚度的非线性补偿
工业机器人关节在高速启停时会产生显著扭转振动,需通过结构优化提升系统刚度。采用双壁式行星架设计可使扭转刚度提升3倍,配合预紧力可调的圆锥滚子轴承,将关节定位精度稳定在±0.05mm以内。某喷涂机器人在Z轴升降模块应用该技术后,轨迹跟踪误差从0.3mm降至0.08mm。
2.3 传动精度的闭环控制
行星减速机的回程间隙直接影响机器人重复定位精度。高端机型通过以下技术实现亚弧分级精度:
齿面修形技术:采用渐开线齿廓微调,将接触应力分布均匀度提升60%
预载调节机构:通过波形弹簧实现0-50μm的轴向预紧量动态调整
温度补偿系统:集成PT100传感器与相变材料,将热变形量控制在5μm/℃以内
某半导体封装机器人应用上述技术后,在0.1mm级微操作场景中实现99.97%的成功率。
三、可靠性保障的关键技术路径
3.1 承载能力的极限校核
工业机器人关节需承受复合载荷,需通过有限元分析进行强度验证。重点校核区域包括:
行星轮与太阳轮的接触疲劳强度(安全系数≥1.5)
行星架的弯曲疲劳强度(许用应力≤200MPa)
轴承的当量动载荷(计算值≤额定载荷的70%)
某重载点焊机器人基座关节采用拓扑优化设计,在保持200kg有效负载的同时,将减速机重量从45kg降至32kg。
3.2 润滑系统的智能管理
润滑状态直接影响减速机寿命,需构建多级润滑体系:
飞溅润滑:适用于中低速场景(转速≤1500rpm)
强制润滑:高速场景需配置油泵循环系统(流量≥5L/min)
固态润滑:在-40℃极寒环境采用二硫化钼基润滑脂
某极地科考机器人通过在减速机内部集成电加热膜与温度传感器,实现润滑油粘度的动态调节,在-50℃环境中仍能保持92%的传动效率。
3.3 故障预测的健康管理
基于振动频谱分析的预测性维护技术可提前300小时预警齿轮磨损。通过在行星架上布置三向加速度传感器,采集100-10000Hz频段振动信号,结合深度学习算法实现:
齿面剥落识别准确率≥95%
轴承保持架断裂预警时间≥72小时
润滑油劣化检测周期缩短至50小时
某汽车总装线应用的智能减速机系统,使设备综合效率(OEE)提升18%,年维护成本降低42%。
四、前沿技术发展趋势
随着人形机器人产业化进程加速,行星减速机技术呈现三大演进方向:
轻量化设计:采用镁合金行星架与碳纤维增强齿轮,使减速机比功率突破35Nm/kg
机电一体化集成:将伺服电机、编码器与减速机封装为标准模组,体积缩小40%
仿生柔顺控制:通过变刚度行星轮系实现类肌肉驱动特性,冲击载荷吸收能力提升3倍
某双足机器人膝关节采用变传动比行星减速机构,在步态周期中动态调整减速比,使能耗降低28%,运动自然度评分提升1.2级。
结语
行星减速机作为工业机器人关节的"动力心脏",其设计需在精度、强度与效率之间寻求最优解。通过模块化齿轮设计、多级传动优化与智能润滑管理等技术创新,现代行星减速机已实现98%以上的传动效率与0.01mm级定位精度。随着新材料应用与数字孪生技术的深度融合,下一代行星减速机将向更高功率密度、更低维护成本与更强环境适应性方向持续进化,为工业机器人打开更广阔的应用空间。