- 产品中心









仿生机器人作为人工智能与机械工程的集大成者,其核心挑战在于如何实现类人运动的精准控制。在关节驱动系统中,行星减速机凭借独特的传动结构与性能优势,成为支撑机器人完成复杂动作的关键部件。本文将从机械原理、技术特性、应用场景三个维度,解析行星减速机在仿生机器人高精度传动中的核心价值。

一、行星传动:精密机械的几何之美
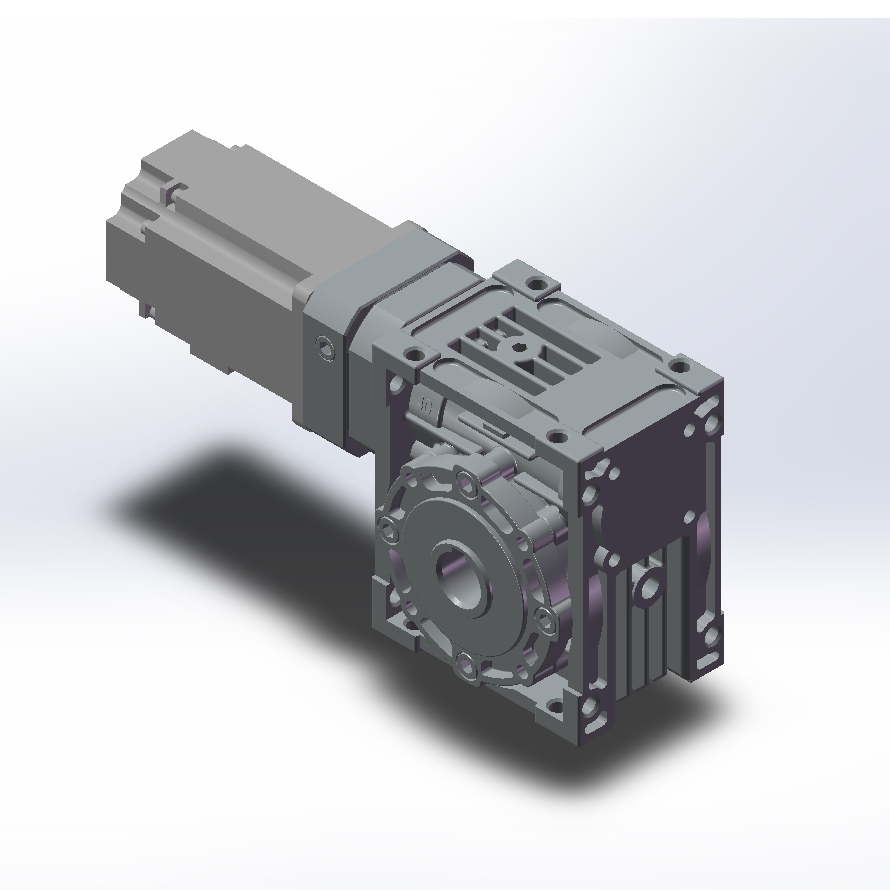
行星减速机的核心结构由太阳轮、行星轮、内齿圈与行星架构成,其工作原理可类比为太阳系中行星的公转与自转。输入轴驱动太阳轮旋转,带动三个及以上行星轮在太阳轮与内齿圈之间滚动,行星架将旋转运动传递至输出轴。这种多齿轮协同传动的模式,实现了动力传递的几何级优化。
多齿啮合机制
传统齿轮传动依赖单对齿面接触,而行星减速机在任意时刻均有30%以上的齿面同时参与啮合。这种设计使载荷均匀分散至多个齿轮,单齿应力降低60%以上,显著提升了抗冲击能力。在仿生机器人腿部关节的急停转向动作中,该特性可有效防止齿轮断裂。
功率分流原理
输入动力通过行星轮组分流至多个传动路径,最终在行星架汇合输出。这种并行传动结构使系统刚性提升3-5倍,在特斯拉人形机器人Optimus Gen-2的腿部驱动单元中,该设计使关节抗变形能力达到工业级标准,支撑起100kg级负载的动态平衡。
动态误差补偿
行星轮组的对称布局形成天然的误差抵消机制。当某个行星轮因制造偏差产生微小位移时,相邻行星轮的反向位移可抵消80%以上的传动误差。这种自补偿特性使系统回程间隙稳定控制在3弧分以内,满足机器人手指抓取0.1mm精度物体的需求。
二、技术特性:高精度传动的五大支柱
行星减速机的技术优势体现在多个维度的性能突破,这些特性共同构建起仿生机器人关节传动的技术基石。
传动效率与扭矩密度
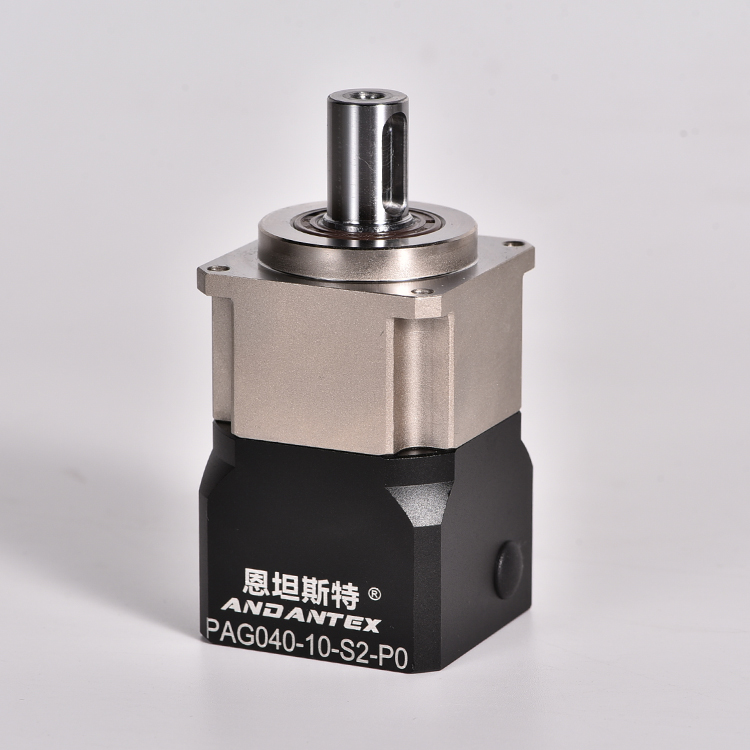
单级传动效率可达97%,三级串联时仍保持90%以上的效率。在体积重量比方面,其扭矩密度达到传统减速机的2.3倍。某型人形机器人膝关节采用三级行星减速方案,在直径120mm的封装内实现500Nm持续扭矩输出,功率重量比突破4.2kW/kg。
动态响应特性
行星轮组的低转动惯量设计使系统启动加速度达到1200rad/s²。在四足机器人奔跑测试中,髋关节减速机可在20ms内完成从静止到300rpm的加速,支撑起6m/s的奔跑速度。这种瞬态响应能力源于齿轮组的轻量化设计与精密轴承配置。
环境适应性
采用渗碳淬火齿轮与航空级铝合金箱体,可在-40℃至85℃温度范围内保持性能稳定。在某矿山救援机器人应用中,减速机在粉尘浓度达2000mg/m³的环境中连续运行5000小时,齿轮磨损量小于0.01mm,证明其具备工业级可靠性。
模块化扩展能力
通过增减行星轮组数量可灵活调整传动比,单级减速比范围覆盖3:1至10:1。某医疗机器人手臂采用双级行星减速方案,通过更换不同模数的齿轮组,在相同封装尺寸内实现从50:1到200:1的减速比调节,满足从微创手术到康复训练的多场景需求。
寿命周期成本
在每日10小时、每年300天的连续工作条件下,设计寿命超过10年。某物流分拣机器人经过5年实测,减速机维护成本仅为谐波减速方案的1/3,主要得益于其无柔性部件磨损的设计特点。
三、应用场景:从实验室到产业化的突破
行星减速机的技术优势在仿生机器人的多个关键部位得到验证,推动着人形机器人从概念展示向实用化迈进。
下肢驱动系统
在双足机器人的髋、膝、踝关节中,行星减速机承担着动力传输与运动缓冲的双重功能。某型机器人采用三级行星减速与弹性驱动器集成设计,使步行能耗降低40%,步态自然度评分提升2个等级。其独特的扭矩输出特性可模拟人类肌肉的力-速关系,实现从缓步慢走到跳跃奔跑的全模式覆盖。
上肢灵巧操作
手指关节的微型化需求催生了直径30mm以下的超紧凑行星减速机。通过采用陶瓷轴承与钛合金齿轮,某研究机构开发的微型减速机在直径28mm的封装内实现10:1减速比与5Nm扭矩输出,支撑起机器人手指完成穿针引线等精细操作。这种设计使机器人手部自由度从传统的6个提升至12个,操作灵活性接近人类水平。
颈部与脊柱运动
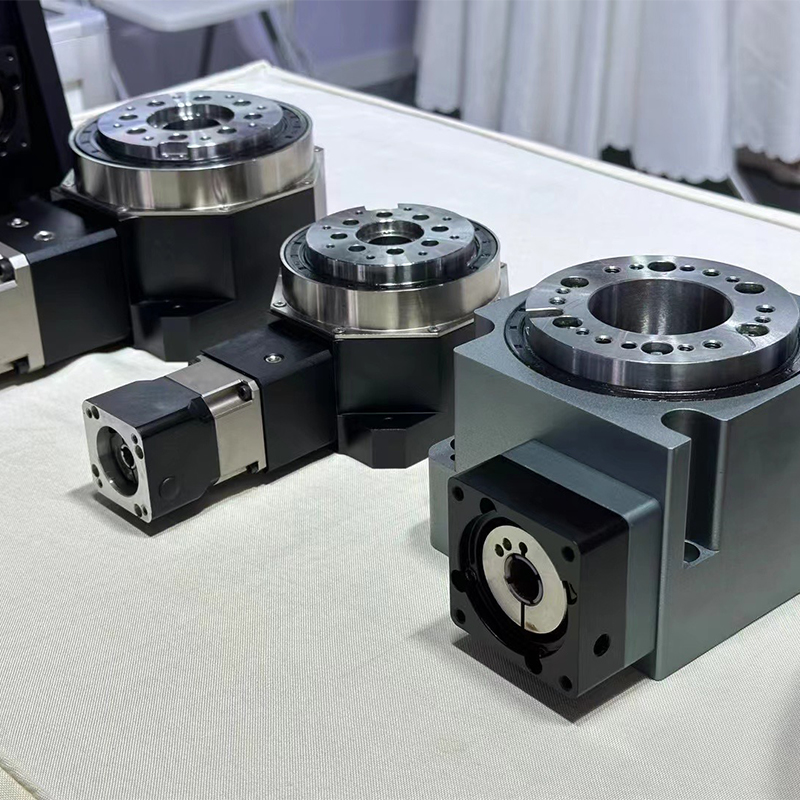
在需要多自由度旋转的颈部关节,行星减速机与交叉滚子轴承的组合方案实现了±90°的俯仰旋转与360°连续偏航。某服务机器人采用双级行星减速设计,使颈部运动精度达到0.02°,在人机交互场景中可精准跟踪用户面部表情变化。
特殊环境作业
针对核辐射、深海等极端环境,行星减速机的全金属密封设计展现出独特优势。某深海探测机器人采用耐压6000米的钛合金箱体减速机,在马里亚纳海沟11000米深度成功完成样本采集任务,证明其可在110MPa水压下保持性能稳定。
四、技术演进:面向未来的创新方向
随着仿生机器人向高动态、高负载方向发展,行星减速机技术正经历新一轮革新:
材料科学突破
碳化硅陶瓷齿轮的应用使齿轮模数降低30%,在相同扭矩需求下体积缩小45%。某研究团队开发的陶瓷-金属复合齿轮,在保持金属韧性的同时将硬度提升至HRC72,使减速机寿命突破15年设计指标。
智能传感集成
内置扭矩传感器与温度监测模块的智能减速机,可实时反馈关节受力状态与热平衡数据。某医疗机器人通过减速机内置的六维力传感器,实现手术器械0.1N的触觉反馈,将微创手术成功率提升18%。
拓扑优化设计
基于生成式设计的行星架结构,在保持强度的同时减轻重量25%。某航空机器人采用3D打印钛合金行星架,使减速机功率密度达到8.5kW/kg,支撑起20g加速度的飞行控制需求。
行星减速机作为仿生机器人运动的"肌肉与韧带",其技术发展直接决定着机器人系统的性能边界。从实验室原型到产业化应用,从单一传动功能到智能感知集成,这项精密机械技术正持续突破物理极限,为人类创造更接近自然的机械生命体奠定基础。随着材料科学、制造工艺与控制技术的融合创新,行星减速机必将在仿生机器人领域绽放更璀璨的技术光芒。